

IMU Data Format & API
IMU Data
For detailed field descriptions, see IMUFrame Properties in API Reference.
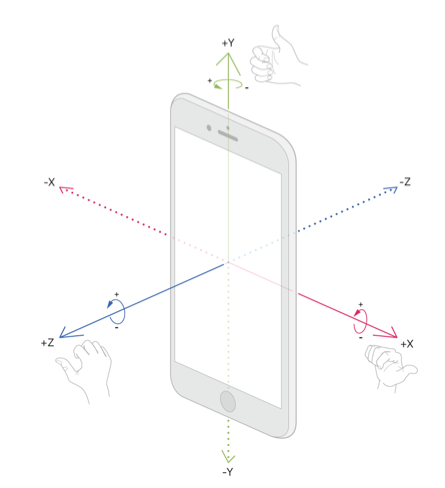
IMU Coordinate System
Coordinate Frame (iPhone device frame):
X-axis: Right (when holding phone in portrait)
Y-axis: Up (toward top of device)
Z-axis: Forward (out of screen)
IMU Data Explained
The IMU data follows Apple's CoreMotion framework conventions. For comprehensive details, refer to Apple's CoreMotion Documentation.
Accelerometer
Total acceleration measured by the device's accelerometer hardware.
Unit: G (gravitational force units, where 1G=9.81 m/s2)
Gyroscope
Angular velocity around each axis.
Unit: rad/s (radians per second)
Magnetometer
Magnetic field strength detected by the device.
Unit: μT (microteslas)
Gravity Vector
Component of acceleration due to Earth's gravitational pull, isolated from user motion.
Unit: G (gravitational force units)
Magnitude: ∣g∣≈1.0G when stationary
Usage: Determining device orientation relative to Earth
Reference: CMDeviceMotion.gravity
User Acceleration
Acceleration from user motion, with gravity removed.
Unit: G (gravitational force units)
Formula: auser=atotal−g
Reference: CMDeviceMotion.userAcceleration
Attitude (Quaternion)
Device orientation in 3D space.
Format: [qx,qy,qz,qw] (quaternion)
Reference: CMAttitude
API Reference
IMUDataSubscriber
Constructor:
Parameters:
ip(str): iPhone's IP addressport(int): Port number (default: 8002, fixed for IMU data)hwm(int): High water mark (default: 1, keeps only latest message)conflate(bool): Message conflation (default: True)verbose(bool): Print connection info (default: False)
Usage:
Main Methods:
Method
Returns
Description
get()
IMUFrame or None
Get latest IMU data frame
get_timestamp()
float or None
Get timestamp only
get_accelerometer()
np.ndarray or None
Get accelerometer only
get_gyroscope()
np.ndarray or None
Get gyroscope only
get_magnetometer()
np.ndarray or None
Get magnetometer only
get_gravity()
np.ndarray or None
Get gravity vector only
get_user_acceleration()
np.ndarray or None
Get user acceleration only
get_attitude()
np.ndarray or None
Get attitude quaternion only
close()
None
Close connection
Note:
The subscriber is iterable, so you can use
for data in sub:to receive frames continuously.All
get_*()methods accept an optionaltimeoutparameter (default: 1000ms).
IMUFrame
Data object returned by get() or when iterating. For data format details and physical meanings, see IMU Data Format Reference above.
Properties:
Property
Type
Description
timestamp
float
Unix timestamp in seconds
accelerometer
np.ndarray
Accelerometer $[a_x, a_y, a_z]$ in G
gyroscope
np.ndarray
Gyroscope $[\omega_x, \omega_y, \omega_z]$ in rad/s
magnetometer
np.ndarray
Magnetometer $[m_x, m_y, m_z]$ in μT
gravity
np.ndarray
Gravity $[g_x, g_y, g_z]$ in G
user_acceleration
np.ndarray
User acceleration $[u_x, u_y, u_z]$ in G
attitude
np.ndarray
Attitude quaternion $[q_x, q_y, q_z, q_w]$
Helper Properties:
Property
Type
Description
has_accelerometer
bool
Check if accelerometer data exists
has_gyroscope
bool
Check if gyroscope data exists
has_magnetometer
bool
Check if magnetometer data exists
has_gravity
bool
Check if gravity data exists
has_user_acceleration
bool
Check if user acceleration exists
has_attitude
bool
Check if attitude data exists
Last updated
Was this helpful?